TECHNOTE LT05-0011
General Sensor TechNote LT05-0011
Copyright © 2009 Lion Precision. www.lionprecision.com
Introduction
Noncontact sensors using capacitive and eddy-current technologies each represent a unique blend of advantages and disadvantages for a variety of applications. This comparison of the two technologies’ strengths will help you select the best technology for your application.
Comparison Table
A quick reference with details below.
•• Best Choice, • Functional Choice, – Not an option
|
Factor |
Capacitive |
Eddy-Current |
| Dirty Environments | – | •• |
| Small Targets | •• | • |
| Large Range | • | •• |
| Thin Materials | •• | • |
| Material Versatility | •• | • |
| Multiple Probes | •• | • |
| Probe Mounting Ease | •• | • |
| Resolution | •• | • |
| Bandwidth | • | •• |
| Cost | • | •• |
Sensor Construction
Figure 1. Capacitive Probe Construction
Understanding the difference between capacitive and eddy-current sensors begins by looking at how they are constructed. At the center of a capacitive probe is the sensing element. This piece of stainless steel generates the electric field which is used to sense the distance to the target. Separated from the sensing element by an insulating layer is the guard ring, also made of stainless steel. The guard ring surrounds the sensing element and focuses the electric field toward the target. A few electronic components are connected to the sensing element and guard ring. All of these internal assemblies are surrounded by an insulating layer and encased in a stainless steel housing. The housing is connected to the grounded shield of the cable (Figure 1).
Figure 2. Eddy-Current Probe Construction
The primary functional piece of an eddy-current probe is the sensing coil. This is a coil of wire near the end of the probe. Alternating current is passed through the coil which creates an alternating magnetic field; this field is used to sense the distance to the target. The coil is encapsulated in plastic and epoxy and installed in a stainless steel housing. Because the magnetic field of an eddy-current sensor is not as easily focused as
the electric field of a capacitive sensor, the epoxy covered coil extends from the steel housing to allow the full sensing field to engage the target (Figure 2).
Spot Size, Target Size, and Range
Figure 3. Capacitive probe spot size
The sensing field of a noncontact sensor’s probe engages the target over a certain area. The size of this area is called the spot size. The target must be larger than the spot size or special calibration will be required.Spot size is always proportional to the diameter of the probe. The ratio between probe diameter and spot size is significantly different for capacitive and eddy-current sensors. These different spot sizes result in different minimum target sizes.
Capacitive sensors use an electric field for sensing. This field is focused by a guard ring on the probe resulting in a spot size about 30% larger than the sensing element diameter (Figure 3). A typical ratio of sensing range to the sensing element diameter is 1:8. This means that for every unit of range, the sensing element diameter must be eight times larger. For example, a sensing range of 500µm requires a sensing element diameter of 4000µm (4mm). This ratio is for typical calibrations. High resolution and extended range calibrations will alter this ratio.
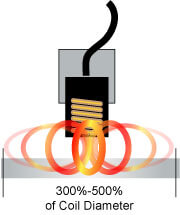
Figure 4. Eddy-Current probe spot size
Eddy-current sensors use magnetic fields that completely surround the end of the probe. This creates a comparatively large sensing field resulting in a spot size approximately three times the probe’s sensing coil diameter (Figure 4). For eddy-current sensors, the ratio of the sensing range to the sensing coil diameter is 1:3. This means that for every unit of range, the coil diameter must be three times larger. In this case, the same 500µm sensing range only requires a 1500µm (1.5mm) diameter eddy-current sensor.
When selecting a sensing technology, consider target size. Smaller targets may require capacitive sensing. If your target must be smaller than the sensor’s spot size, special calibration may be able to compensate for the inherent measurement errors.
Sensing Technique
Capacitive and eddy-current sensors use different techniques to determine the position of the target. Capacitive sensors used for precision displacement measurement use a high-frequency electric field, usually between between 500 kHz and 1 MHz. The electric field is emitted from the surfaces of the sensing element. To focus the sensing field on the target, a guard ring creates a separate but identical electric field which isolates the sensing element’s field from everything but the target (Figure 5).
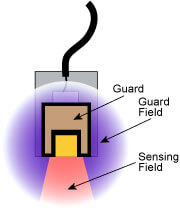
Figure 5. Capacitive probe guarding
The amount of current flow in the electric field is determined in part by the capacitance between the sensing element and the target surface. Because the target and sensing element sizes are constant, the capacitance is determined by the distance between the probe and the target, assuming the material in the gap does not change. Changes in the distance between the probe and the target change the capacitance which in turn changes the current flow in the sensing element. The sensor electronics produce a calibrated output voltage which is proportional to the magnitude of this current flow, resulting in an indication of the target position.
Rather than electric fields, eddy-current sensors use magnetic fields to sense the distance to the target. Sensing begins by passing alternating current through the sensing coil. This creates an alternating magnetic field around the coil. When this alternating magnetic field interacts with the conductive target, it induces a current in the target material called an eddy current. This eddy current produces its own magnetic field which oppose the sensing coil’s field (Figure 6).
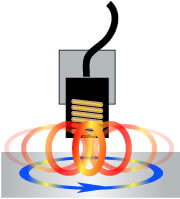
Figure 6 Magnetic field induces
eddy current in conductive target
As the eddy currents in the target oppose the sensing field, the impedance of the sensing coil will change. The amount of impedance change is dependent on the distance between the target and the sensing coil in the probe. Current flow in the sensing coil, which is impedance dependent, is processed to create the output voltage which is an indication of the position of the target relative to the probe.
Error Sources
Eddy-current sensors use changes in a magnetic field to determine the distance to the target; capacitive sensors use changes in capacitance. There are factors other than the distance to the target that can also change a magnetic field or capacitance. These factors represent potential error sources in your application. Fortunately, in most cases these error sources are different for the two technologies. Understanding the presence and magnitude of these error sources in your application will help you choose the best sensing technology.
The remainder of this article will explain these error sources so that you can make the best choice for your application and get the best possible results.
Gap Contamination
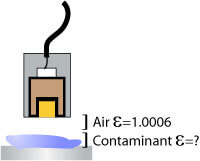
Figure 7 Gap contamination
creates change in gap dielectric
In some applications, the gap between the sensor and target can become contaminated by dust, liquids such as coolant, and other materials which are not part of the intended measurement. How the sensor reacts to the presence of these contaminants is a critical factor in choosing capacitive or eddy-current sensors.
Capacitive sensors assume that changes in capacitance between the sensor and the target are a result of a change in distance between them. Another factor that affects capacitance is the dielectric constant (ε) of the material in the gap between the target and sensor. The dielectric constant of air is slightly greater than one; if another material, with a different dielectric constant, enters the sensor/target gap, the capacitance will increase, and the sensor will erroneously indicate that the target has moved closer to the sensor (Figure 7). The higher the dielectric constant of the contaminant, the greater the effect on the sensor. Oil has a dielectric constant between 8 and 12. Water has a very high dielectric constant of 80.
Because of the sensitivity to the dielectric constant of the material between the sensor and the target, capacitive displacement sensors must be used in a clean environment when measuring target position.
The dielectric sensitivity of capacitive sensors can be exploited for use in sensing the thickness or density of nonconductive materials. For more information on this type of application, please refer to our Capacitive Sensor Theory TechNote.
Unlike capacitive sensors, eddy-current sensors use magnetic fields for sensing. Magnetic fields are not affected by nonconductive contaminants such as dust, water, and oil. As these contaminants enter the sensing area between an eddy-current sensor and the target, the sensor’s output is not affected.
For this reason, an eddy-current sensor is the best choice when the application involves a dirty or hostile environment. Lion Precision eddy-current probes are rated at IP67 and can even be used completely immersed in non-corrosive liquid.
Target Thickness
Capacitive and eddy-current sensors have different requirements for target thickness. The electric field of a capacitive sensor engages only the surface of the target with no significant penetration into the material. Because of this, capacitive sensors are not affected by material thickness.
The magnetic field of an eddy-current sensor must penetrate the surface of the target in order to induce eddy currents in the material. If the material is too thin, smaller eddy currents in the target produce a weaker magnetic field. This results in the sensor having reduced sensitivity and a smaller signal to noise ratio.
The depth of penetration of the sensor’s magnetic field is dependent on the material and the frequency of the sensor’s oscillating magnetic field. Lion Precision eddy-current sensors typically use a frequency of 1-2MHz. Table 1 shows minimum thicknesses for some common materials.
More detail can be found on the Minimum Recommended Target Thickness TechNote.
Target Materials and Rotating Targets
Capacitive and eddy-current sensors respond differently to differences in target material. The magnetic field of an eddy-current sensor penetrates the target and induces an eddy current in the material which creates a magnetic field that opposes the field from the probe. The strength of the eddy current and the resulting magnetic field depend on the permeability and resistivity of the material. These properties vary between different materials. They can also be changed by different processing techniques such as heat treating or annealing. For example, two otherwise identical pieces of aluminum that were processed differently may have different magnetic properties. Between different nonmagnetic materials such as aluminum and titanium the variance of permeability and resistivity can be small, but a high performance eddy-current sensor calibrated for one nonmagnetic material will still produce errors when used with a different nonmagnetic material.
The differences between nonmagnetic materials like aluminum and titanium and magnetic materials such as iron or steel are enormous. While the relative permeability of aluminum and titanium are approximately one, the relative permeability of iron can be as high as 10,000.
Eddy-current sensors calibrated for nonmagnetic materials are not likely to function at all when used with magnetic materials. When using eddy-current sensors for precise measurements, it is critical that the sensor be calibrated for the specific material used in the application.
The high permeability of magnetic materials such as iron and steel can also cause small eddy-current sensor errors within the same piece of material. Within any imperfect material, there are microscopic cracks and material variations. The material’s permeability changes slightly around these areas. While the changes are relatively small, the extremely high permeability of magnetic materials enables high-resolution eddy-current sensors to detect these changes. This problem is most evident in rotating targets of magnetic materials.
Figure 8 Runout plot showing
actual runout in blue,
and electrical runout from
eddy-current sensor in red.
An eddy-current sensor can be mounted to measure the runout of a rotating shaft. But even if the shaft is ideal, with absolutely no runout, a high resolution eddy-current sensor will detect a repeatable pattern of changes as the shaft rotates (Figure 8). These changes are a result of small variations in the material. This phenomenon is well known and is called electrical runout. These errors can be small, often in the micron range. Many shaft runout applications, especially those in hostile environments where eddy-current sensors are the norm, are looking for much larger errors and can therefore tolerate these errors. Other more precise applications will need to use techniques to address these errors or use a different sensing technology such as capacitive sensors.
The electric field of a capacitive sensor uses the target as a conductive path to ground. All conductive materials offer this equally well, so capacitive sensors measure all conductive materials the same. Once a capacitive sensor is calibrated, it can be used with any conductive target with no degradation in performance.
Because the electric field of a capacitive sensor does not penetrate the material, variations within the material do not affect the measurement. Capacitive sensors do not exhibit the electrical runout phenomenon of eddy-current sensors and can be used with rotating targets of any conductive material without additional error.
Eddy-current sensors should be calibrated to the same material as the target in the application and should not be used with rotating magnetic material targets unless the electrical runout errors are acceptable in the application. Capacitive sensors, once calibrated, can be used with any conductive material with no material related errors, and they work well with rotating targets.
Environmental Parameters: Temperature and Vacuum
Because of differences in the sensing physics and the associated differences in driver electronics, capacitive and eddy-current sensors have different probe operating temperature ranges and vacuum compatibility.
Lion Precision capacitive and eddy-current probes have different operating temperature ranges. Eddy-current probes, because of their tolerance of hostile environments have a greater temperature range. Standard eddy-current probes, which use polyurethane cables, have an operating range from -25 to +125°C. High temperature probes, which use teflon FEP cables, have an operating range of -25 to +200°C. Capacitive probes, which are affected by condensation, only have an operating range of +4 to +50 °C. The driver electronics for both sensing technologies have an operating range of +4 to +50°C.
Capacitive and eddy-current probes can both be used in vacuum applications. Materials in the probes are selected for structural stability and minimized outgassing under vacuum. Vacuum compatible probes are subjected to an extra cleaning process and special packaging to remove foreign materials that may threaten a delicate vacuum environment.
Many vacuum applications require precise temperature control. The probe’s power consumption, with its associated contribution to temperature change, is where capacitive and eddy-current technologies differ. A capacitive probe has extremely small current flow and power consumption. A typical capacitive probe consumes less than 40µW of power, contributing little heat to the vacuum chamber.
The power consumption in an eddy-current probe can vary from 40µW to as high as 1mW. At these higher powers, the eddy-current probe will contribute more heat to the vacuum chamber and could disturb high-precision vacuum environments. The power consumption in an eddy-current probe is dependent on many factors; probe size alone is not a good predictor of power consumption. Each eddy-current sensor’s power consumption must be assessed individually.
Either capacitive or eddy-current sensors can work well in vacuum environments. In temperature sensitive vacuums, eddy-current sensors may contribute too much heat for the application. In these applications, capacitive sensors will be a better choice.
Probe Mounting
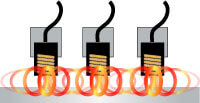
Figure 9. Interference occurs when
eddy-current probes are
mounted near each other.
Because of differences in the shape and reactive nature of the sensing fields of capacitive and eddy-current sensors, the technologies have different probe mounting requirements. Eddy-current probes produce comparatively large magnetic fields. The field diameter is at least three times larger than the probe diameter and greater than three diameters for large probes. If multiple probes are mounted close together, the magnetic fields will interact (Figure 9). This interaction will create errors in the sensor outputs. If this type of mounting is unavoidable, sensors based on digital technology such as the ECL202 can be specially calibrated to reduce or eliminate the interference from adjacent probes.
The magnetic field from an eddy-current probe also extends about one and a half diameters behind the probe. Any metallic objects in this area, usually mounting hardware, will interact with the field and affect the sensor output (Figure 10). If nearby mounting hardware is unavoidable, sensors can be calibrated with the mounting hardware in place which will compensate for the effect of the hardware.
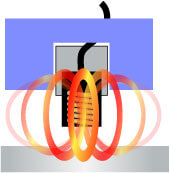
Figure 10. Mounting hardware can
interfere with eddy-current
probe magnetic field.
The electric fields of capacitive probes are only emitted from the front surface of the probe. The field has a slightly conical shape resulting in a spot size about 30% larger than the sensing area diameter. Nearby mounting hardware or other objects are rarely in the field area and therefore do not affect the sensor’s calibration. When multiple, independent capacitive sensors are used with the same target, the electric field from one probe may be trying to add charge to the target, while another sensor is trying to remove charge (Figure 11).
This conflicting interaction with the target will create errors in the sensors’ outputs. This problem is easily solved by synchronizing the sensors. Synchronization sets the drive signal of all sensors to the same phase so that all probes are adding or removing charge simultaneously and the interference is eliminated. All Lion Precision multiple channel systems are synchronized, eliminating any concern about this error source.
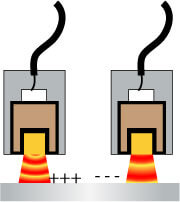
Figure 11. Nonsynchronized capacitive
sensors will interfere when
used on the same target.
When an application requires the use of multiple probes with a common target, synchronized capacitive sensors are easy to use. If the application requires eddy-current technology, special care must be taken in the mounting plan and special calibration may be required.
Summary
There are many factors to consider when choosing between capacitive and eddy-current displacement sensors. Any application that involves measurement area contaminants such as liquids or waste material requires eddy-current sensing. Capacitive sensors require a clean environment.
Small targets will be more easily measured with capacitive sensors because of the comparatively small size of the capacitive sensing field. When eddy-current sensing is required, special calibration can be used with small targets.
For the same size capacitive or eddy-current probe, the eddy-current probe will have a larger measurement range.
Because capacitive probes interact with the surface of the target, the material thickness is not a factor in capacitive measurements. Eddy-current sensors have minimum target thickness requirements.
Capacitive sensors have no sensitivity to the target material provided it is conductive. Eddy-current sensors are sensitive to material differences and must be calibrated to the application’s target material.
When using multiple probes, capacitive sensors must be synchronized, but can be mounted close together without interference. Even when synchronized, eddy-current probes will interact if mounted close together. When this is unavoidable, special calibration can be used but is only available with digital sensors like the Lion Precision ECL202.
A capacitive probe’s small sensing field, which is directed only at the target, prevents it from sensing mounting hardware or nearby objects. Eddy-current’s large, surrounding sensing field can detect mounting hardware or other objects if they are too near the sensing area.
Two other specifications differ between the two technologies: resolution and bandwidth. Capacitive sensors have higher resolutions than eddy-current sensors making them a better choice for high resolution, precise applications.
Most capacitive and eddy-current sensors have bandwidths of 10-15kHz, but some eddy-current sensors (ECL101) have bandwidths as high as 80 kHz.
Another difference between the technologies is cost. Generally speaking, eddy-current sensors are lower cost.
This review of the differences between capacitive and eddy-current sensing technologies will help you determine which technology is the best choice for your application. Please contact us for more help in selecting the best sensor.